Объединенный институт ядерных исследований

ЕЖЕНЕДЕЛЬНИК Электронная версия с 1997 года |
Газета основана в ноябре 1957 года
| |
|
Номер 48 (4442) от 29 ноября 2018: |
Сообщение в номер
Робот вам в помощь!
Роботизированный манипулятор для перемещения высокорадиоактивных образцов начал работать на установке для радиационных исследований (пучок №3) реактора ИБР-2. Здесь проводятся исследования радиационной стойкости довольно широкого круга материалов, которые используются в качестве сенсоров магнитного поля для токамаков (ITER, DEMO), элементов детекторов для коллайдеров (LHC, NICA) и других систем, нейтронных прерывателей и нейтроноводов.
Установка имеет следующие характеристики. Плотность потока нейтронов с энергией 25 мэВ - 10 МэВ составляет от 5·105 н/см2·с до 2·1012 н/см2·с, что обеспечивает флюенс нейтронов, прошедших через образец за один стандартный цикл работы реактора (11 суток), от 5·1011 н/см2 до 2·1018 н/см2. При этом температура на образце во время облучения в самой ближней к активной зоне точке не превышает 50°С.
В этих исследованиях принимают участие большое количество ведущих российских и зарубежных научных и научно-образовательных центров: Уральский федеральный университет (Екатеринбург), Троицкий институт инновационных и термоядерных исследований ГК "Росатом" (Москва), Национальный исследовательский ядерный университет МИФИ, ФИРАН, лаборатория магнитных сенсоров Национального университета Львовская Политехника (Украина), Белорусский государственный технологический университет (Минск), Институт ядерной физики Академии наук республики Узбекистан (Ташкент), ускорительный центр ТРИУМФ (Ванкувер, Канада), физический департамент Нанкинского университета (Китай), European spallation source (Лунд, Швеция) и, конечно же, лаборатории нейтронной физики, физики высоких энергий, ядерных проблем и ядерных реакций ОИЯИ.
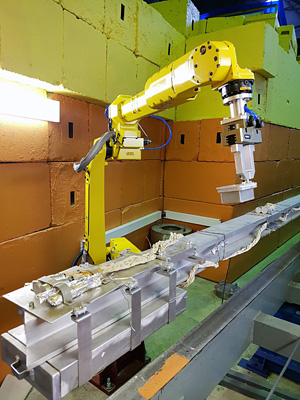 |
| Роботизированный манипулятор перемещает образцы. |
Авторы благодарят коллектив научно-экспериментального отдела комплекса спектрометров и электротехнического отдела ЛНФ имени И.М.Франка в лице Глеба Германовича Комышева, Алексея Викторовича Галушко, Алексея Владимировича Алтынова, Валерия Владимировича Ермолаева, Александра Петровича Сиротина, Валерия Константиновича Широкова, Анатолия Алексеевича Панкова, Георгия Юрьевича Царитова, Виктора Ивановича Евстратова и Льва Вячеславовича Фомичева за неоценимый вклад в реализацию проекта по внедрению роботизированного манипулятора на реакторе ИБР-2.
Максим БУЛАВИН, Сергей КУЛИКОВ